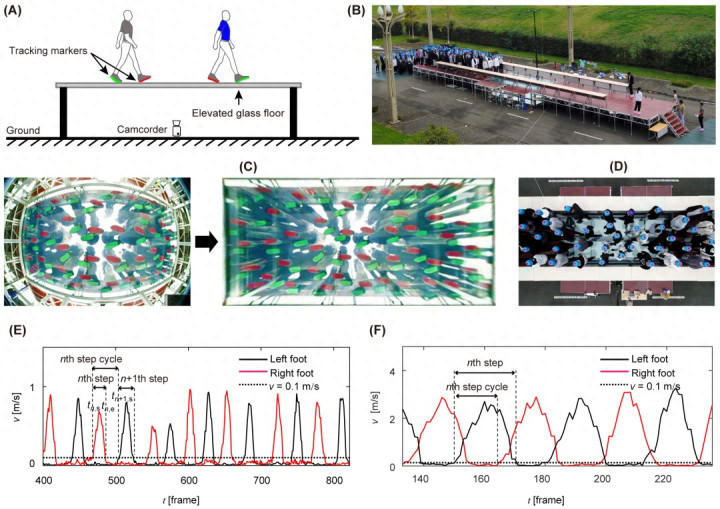
近日正规的股票杠杆平台,四川大学教授马毅和团队研发出一种高精度的行人追踪技术(如下图所示),能够实现密集人群环境下行人移动及步态的精确追踪。这使得对行人移动行为进行全面深入的分析成为可能。

借助行人追踪技术,充分揭示行人移动的行为规律
借助研发的行人追踪技术,团队开展了行人移动实验,采集了行人移动数据,对行人移动行为进行了系统观测与定量分析,揭示了行人在移动时是如何根据感知到的环境信息调节运动速度、方向及步态这一问题。
研究发现,行人在移动时会展现出三种不同的动力学状态(自由状态、慢移动状态和拥堵状态)。当人群密度低于约 0.75 人/平米时,行人能够处于自由流动状态。此时,行人的移动不会受到约束,能够以正常速度移动。当人群密度介于 0.75 至 1.80 人/平米时,行人将处于慢移动状态。此时,行人会通过降低速度及步长来防止与周围的人或障碍物发生碰撞。当人群密度高于约 1.80 人/平米时,行人将处于拥堵状态,其速度会大幅降低,会通过频繁改变步态及方向来实现移动及避碰。
研究还发现,行人的速度及步长与人群密度的倒数呈指数关系。此外,研究还在实验观测的基础上构建了一个能够模拟大规模行人运动并预测行人步态的理论模型。研究结论及理论模型在人流疏散预测、人形机器人步态设计、自动驾驶汽车行人移动预测领域中具有重要的应用价值。
这项研究得到了国际同行的高度肯定。审稿人在审稿过程中对这项研究分别给予了“这项研究解决了行人动力学研究中存在的一个挑战性问题--行人步态追踪”、“这项研究充分揭示了行人移动的行为规律,研究结果在交通科学领域具有重要的应用价值”等高度肯定的评语。
“这项研究在自动驾驶、人形机器人等领域中具有重要的应用价值,能够助力自动驾驶、人形机器人的发展。”马毅告诉 DeepTech。
首先,行人移动预测是自动驾驶汽车必不可少的技术模块。这项研究提出了一个能够深度预测行人步态的行人移动预测模型,使得行人移动预测结果更加的全面准确。这对于提高自动驾驶汽车的行驶安全性至关重要。
另外,这项研究通过行人步态追踪充分揭示行人在移动时,如何根据感知到的环境信息调节运动速度、方向及步态这一问题,为人形机器人运动导航及步态规划与设计奠定了理论基础。
图 | 马毅(来源:马毅)

行人动力学研究具有重要社会应用价值
据介绍,马毅的研究主要以行人动力学(Pedestrian Dynamics)为中心,涵盖人流疏散、自动驾驶、人形机器人等研究领域。行人动力学是专门研究行人在各种复杂环境中如何移动、如何导航、如何根据感知到的环境信息调节速度方向、如何与周围事物进行交互、如何避免与周围事物发生碰撞等科学问题的一门学科。
科学源于生活,马毅选择这一研究方向也正是受现实生活的影响。其博士阶段在香港城市大学完成。香港是全球人口密度最大的城市之一,每天在街道上、大型建筑及交通枢纽内部都会聚集大量的行人,这给城市的日常交通以及突发灾害情况下人流的安全疏散带来了巨大的压力和挑战。这些现实生活问题触发了马毅对行人问题的思考,慢慢也对这一研究方向产生了兴趣。因此,马毅选择了行人动力学作为自己的研究方向。
在完成博士学习后马毅开始寻找工作。在这期间马毅了解到,四川大学灾后重建与管理学院由四川大学与香港理工大学联合创建,在防灾减灾与灾后重建管理方面具有较高的知名度。马毅的研究涉及人流疏散问题,这正好是防灾减灾与灾后重建管理中的重要一环。并且,该学院所在地四川省人口众多、自然灾害多发频发。在灾害发生时需要及时对人口进行疏散。这让其感受到人流疏散研究在当地具有重要的社会应用价值,因此其选择加入了四川大学灾后重建与管理学院。
而行人动力学研究不但能够用于指导灾害发生时的人流疏散,而且在自动驾驶、人形机器人等产业领域具有重要的应用价值。特别是对于自动驾驶汽车来讲,了解行人的移动规律性并对行人的移动进行精确的预测,是保障自动驾驶汽车行驶安全性的前提。从人形机器人的角度,充分理解人的移动导航、步行行为、避碰和步态,是人形机器人运动导航及步态规划与设计的基础。
尽管研究行人动力学、探索行人移动行为规律具有重要的应用价值,但目前人们对行人动力学的研究和认识仍然不足。
首先,对行人移动行为规律的探索需要借助行人移动追踪技术,但现有的行人移动追踪技术普遍采用行人头追踪的方式(即通过鸟瞰视角去记录追踪行人的移动)。但这种方式难以追踪行人的脚移动,难以发现行人在每一步是如何根据感知到的环境信息调节运动速度、方向及步态这一问题。
其次,现有行人移动预测技术普遍难以去深度预测行人的步态,因而很难适用于自动驾驶汽车行人移动预测及人形机器人移动导航的现实需求。特别对于人形机器人来讲,深度预测行人的步态是必不可少的。因为与人类一样,人形机器人在每一步移动时需要根据感知到的环境信息对移动的步长、步频等步态参数进行精确的预测。
基于上述原因,马毅启动了本项研究,旨在弄清楚行人在移动时是如何根据感知到的环境信息调节运动速度、方向及步态这一问题。

整项研究时间跨度长达 10 年,后续将结合人工智能及机器学习方法
整项研究的时间跨度长达 10 年,在马毅读博的时候(大约在 2015 年)就设想通过追踪行人步态来深度探索行人移动的行为规律。但在密集人群中精确追踪行人步态具有很大的挑战性,同时也由于人力物力的限制,这项研究也一直搁置。
一直到 2018 年事情有了转机。马毅首次尝试了在队列行人流中追踪行人步态,成果顺利发表在物理学领域高水平期刊 Physical Review E 上,并被该期刊作为 Highlighted Article 进行了重点报道。这项研究成果给了马毅极大的鼓舞,也意识到这一研究的潜在重要性。此后研究团队进一步改进了行人追踪技术,深度揭示了队列行人流中的行人动力学,成果于 2021 年发表在 Nature 出版社期刊 Nature Human Behaviour 上。
但在后面的研究过程中,课题组先后遭遇严重的研究经费、人力资源和设备短缺等困难。幸运的是,马毅所在的学院给了马毅在精神上、研究经费上、实验场地上的极大支持,同时马毅的同事牛志攀副教授、马毅的同门中南民族大学施朦副教授、上海海事大学王维莉副教授、四川大学谢玮副教授、西南交通大学户佐安副教授、马毅的学生现于香港理工大学攻读博士的曾添与魏易东同学、以及马毅在香港城市大学的良师益友李伟民教授、袁国杰教授在精神上或研究经费上给予了这项研究极大的支持。最终成功克服困难,成功研发出了能够实现二维密集人群环境下追踪行人步态的高精度的行人追踪技术,揭示行人在移动时是如何根据感知到的环境信息调节运动速度、方向及步态这一重要科学问题,并顺利在 Science 出版社期刊 Science Advances 上发表。
接下来,马毅将继续深挖行人动力学,并结合人工智能及机器学习方法,开发基于数据驱动的高精度行人移动及步态预测模型与技术。另外,课题组在未来几年还将积极寻求与自动驾驶及人形机器人工业界的合作,以实现在自动驾驶、人形机器人领域的实际应用。
参考资料:
1.Ma, Y., Lee, E. W. M., Shi, M.,Yuen, R. K. K. (2021). Spontaneous synchronization of motion in pedestrian crowds of different densities. Nature human behaviour, 5, 447-457.
2.Ma, Y., Niu, Z., Shi, M., Xie, W., Hu, Z., Wei, Y., Zeng, T.,Lee, E. W. M. (2025). Unraveling human crowd dynamics through the foot tracking of pedestrians. Science Advances, 11, eadw2688.
3.Ma, Y., Sun, Y. Y., Lee, E. W. M.,Yuen, R. K. K. (2018). Pedestrian stepping dynamics in single-file movement. Physical Review E, 98, 062311.
运营/排版:何晨龙正规的股票杠杆平台
趣策略提示:文章来自网络,不代表本站观点。
相关文章


热点资讯